
Dijkstra’s Shortest Path Algorithm is a popular algorithm for finding the shortest path between different nodes in a graph. It was proposed in 1956 by a computer scientist named Edsger Wybe Dijkstra. Often used in routing, this algorithm is implemented as a subroutine in other graph algorithm. In this post, I have included a pseudo code and source code for Dijkstra’s Algorithm in C along with a brief introduction to this algorithm.
Dijkstra’s algorithm finds the solution for the single source shortest path problems only when all the edge-weights are non-negative on a weighted, directed graph. In other words, the graph is weighted and directed with the first two integers being the number of vertices and edges that must be followed by pairs of vertices having an edge between them. In the source code for Dijkstra’s algorithm in C, the inputs are asked as source, target and the weight of the path between two nodes.
Dijkstra’s Algorithm to Find the Shortest Path:
Let’s fix a node as the initial node; this will be the node at which we are starting. Let the distance of node “Y” be the distance from the initial node to “Y”. Now, in Dijkstra’s algorithm, some initial distance values are assigned, and these values are improved step by step. The algorithm procedure is given below:
- A tentative distance value is assigned to every node; this value is set to zero for the initial node, and to infinity for all other nodes.
- All nodes unvisited are marked, and the initial node is set as current. An unvisited set ( a set of all the unvisited nodes) consisting of all the nodes is created.
- For the current/initial node, take into account all the unvisited nearby nodes, and calculate their tentative distances. Make a comparison of the current assigned value and the newly calculated tentative distance; assign the smaller value. For example: if the current/initial node X was marked with a distance of 4, and the edge connecting it with a nearby neighbor node Y has length 1, then the distance through X to Y will be 4 + 1 = 5. If Y was previously assigned a value greater than 5, then change it to 5. Otherwise, keep the value as it is.
- A visited node is never to be checked again. So, after finishing above steps with all the neighbors of the current node, make that node as visited and remove is from the unvisited set.
- Stop the algorithm if, when planning a route between two specific nodes, the destination node has been marked visited.
- Also, stop the algorithm if, when planning a complete traversal, the smallest tentative distance among the nodes in the unvisited set is infinity. This case is a result of no connection between the initial node and the remaining unvisited nodes.
- Find the unvisited node assigned with the smallest tentative distance value, and this will be the new “current mode”. Go back to step 3, and continue.
Below is an example which further illustrates the Dijkstra’s algorithm aforementioned. Consider a weighted graph as shown:

Weighted Graph
Here, a, b, c, d, e and f are nodes of the graph, and the number between them are the distances of the graph. Now, using Dijkstra’s algorithm we can find the shortest path between initial node a and the remaining vertices. For this, the adjacency matrix of the graph above is:
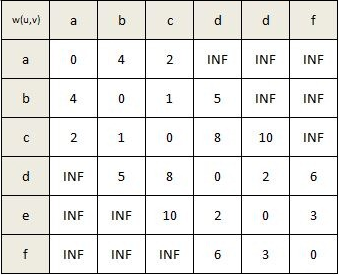
Dijkstra’s Table
Pseudo Code for Dijkstra’s Algorithm:
Given above is a sample source code for Dijkstra’s algorithm, referred from Wikipedia. This exact pseudo may have not been used in writing the source code for Dijkstra’s algorithm in C, but it can be used as a reference for coding in any higher level programming language.
Source Code for Dijkstra’s Algorithm in C:
Copy and compile the source code above in Code::Blocks IDE. Compiling it on other platforms such as Turbo C may produce errors, and might require some modifications to the code.
No comments:
Post a Comment